Nilay Sheth
Projects

Presence footprint
A few pictures in the slides below are hyperlinked, so click away on the moving pictures if you like the project! :P
Hydrogen fuel cell systems (2021-2023)
Electric vehicles offer a zero-emission power promise. However the prevailing challenges related to battery sizing, sustainable battery manufacturing and charging time appear when EVs are used for heavy duty applications. Bigger batteries for heavy duty applications increase the weight of the vehicle significantly, in turn decreasing the range.
Hydrogen, being one of the most energy dense & lightest elements, scales reasonably with a bigger power demand, is quick to refuel and reduces reliance on big batteries while still living upto the zero emission promise. In a fuel cell system, as hydrogen and oxygen combine to produce water, both electricity & heat are released. Electricity is used to power the vehicle & heat can be used to condition the temperature in the vehicle.
This power plant requires a number of compressors, heaters, inverters, valves, sensors & DCDC converters to be orchestrated perfectly to power the vehicle. A central computer (ECU), manages the communication with the vehicle, estimates various physical entities based on sensor measurements, controls various internal actuators depending on the power demand and determines the operating condition of the plant. Most of this software was safety-critical & requires compliance to various standards. This brings the attention to test driven embedded systems development along with the need of various support and analysis tools. Part of the embedded team, the above tasks were our responsibility.
 Terberg yard tractor running on zepp's 50 kW system
Terberg yard tractor running on zepp's 50 kW system zepp solutions's 50 kW and 150 kW hydrogen fuel cell systems
zepp solutions's 50 kW and 150 kW hydrogen fuel cell systems Toying with sensors
Toying with sensors Sometimes a happy developer
Sometimes a happy developer Moment of truth: validation step
Moment of truth: validation step
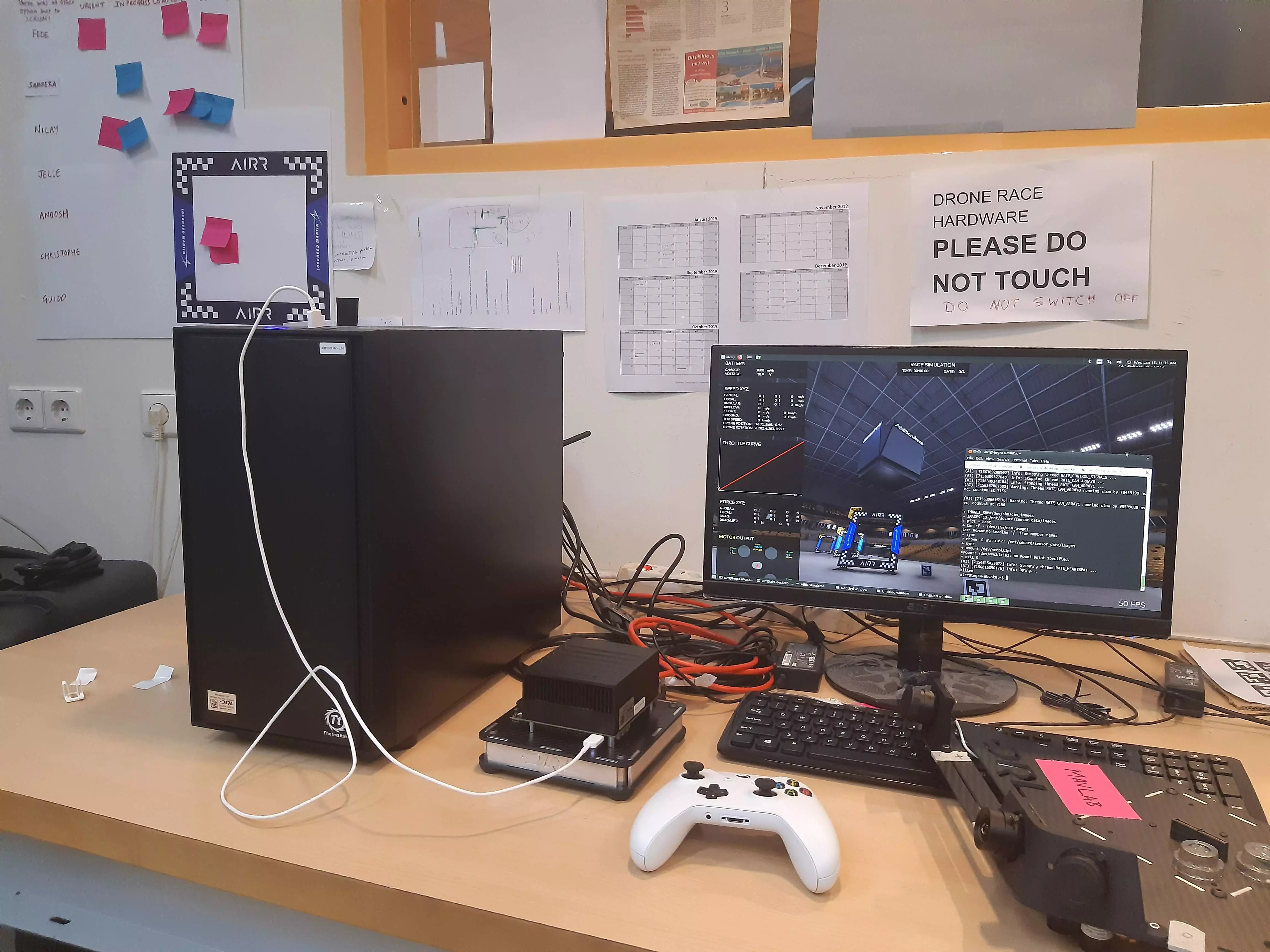
AlphaPilot (2019)
Make drones fly at the limits of flight to finish a race in the shortest time, autonomously. Won $1M competing against 400 research groups around the world. This challenge is introduced for staging AI against the top-most drone pilots of the world. The competition not only evaluates the competitive-ness of the deployed algorithms, but also gives researchers a chance to change the perspective of the pre-existing sport. This change of perspective towards a game took place earlier when DeepMind’s AlphaGo beat the world champion Lee Sedol in 2016. Computers are capable of making decisions which are rather unanticipated by humans but in the end have a higher probability of winning. Such unconventional moves have led to a complete change of perspective in the 300 year old game of Go. AlphaPilot poses a slightly different technical challenge as compared to these game based AI algorithms by the introduction of real-world robot dynamics. While trying to increase the probability of winning, it must send tireless continuous millisecond signals which are not only responsible for making them fly the fastest, but also for fighting against pseudo forces, drag and gravity to maintain their stable “upside-up” configuration.




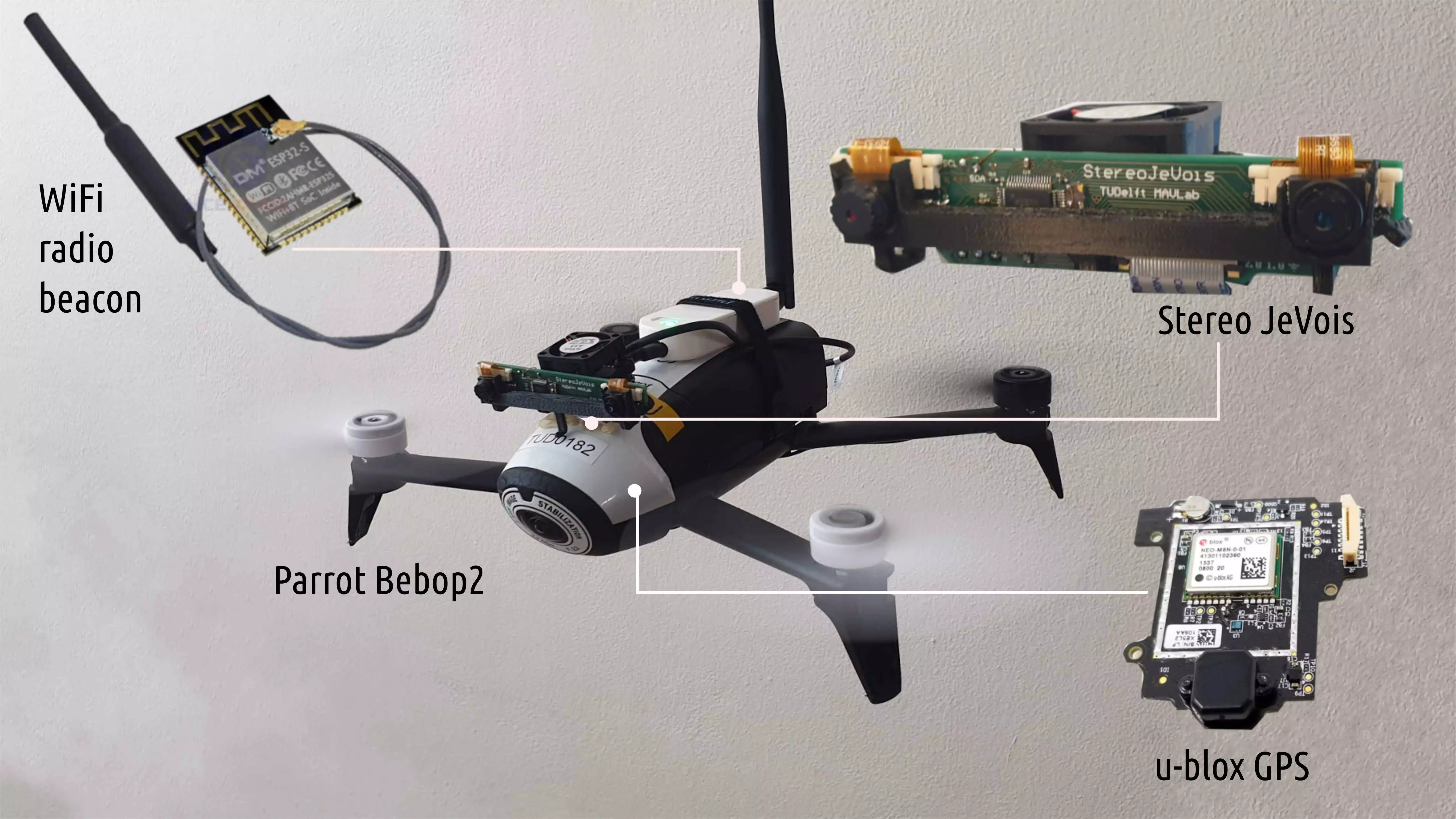
Percevite (2020)
PercEvite: Sense and Avoid for small + unmanned aerial vehicles. Each drone is its own Air Traffic control. Project under Single European Sky Initiative (SESAR).
-
 Sense and Avoid for small drones ©MAVLab
Sense and Avoid for small drones ©MAVLab -
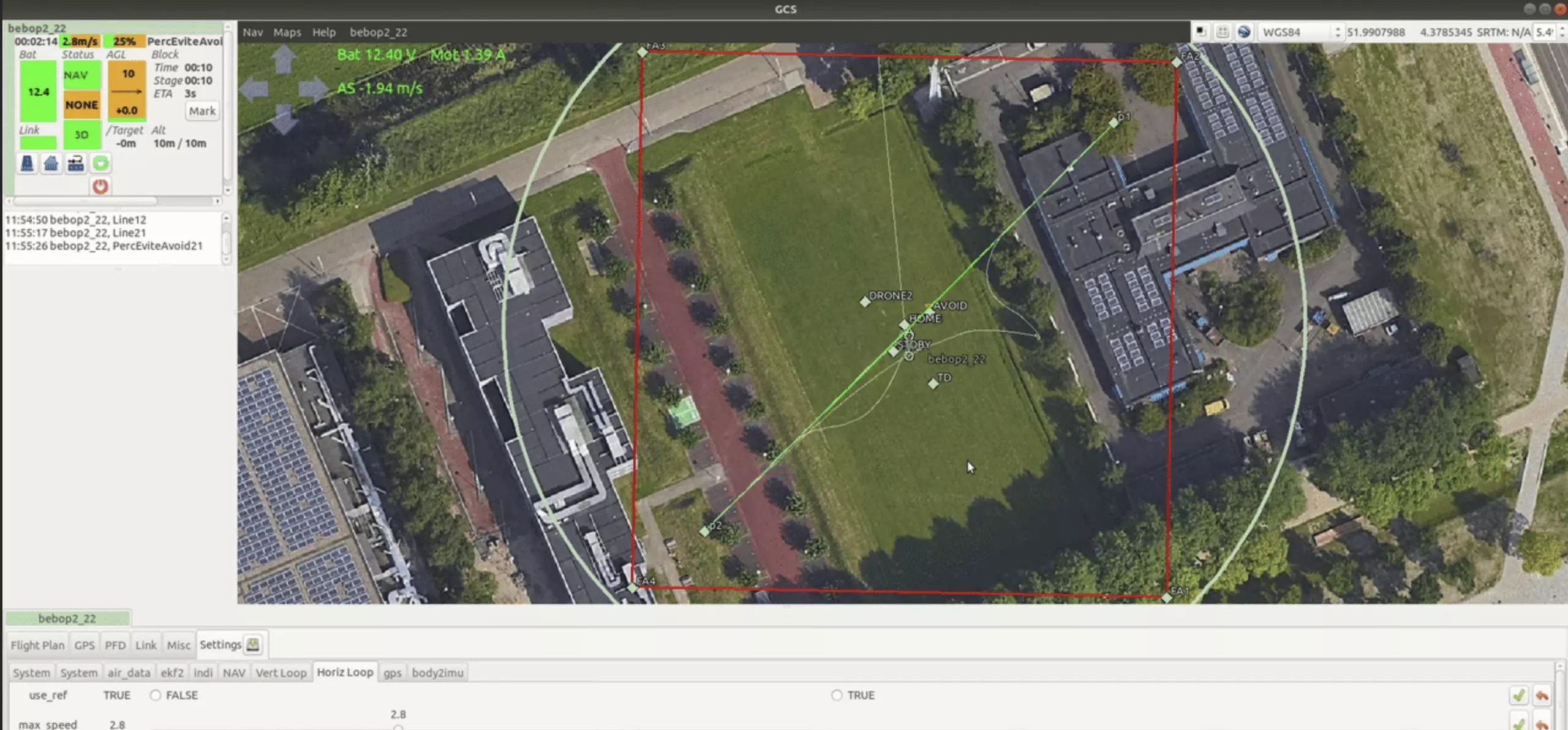 Outdoor flights on Paparazzi Autopilot ©MAVLab
Outdoor flights on Paparazzi Autopilot ©MAVLab -
 HiL simulations of conflict resolutions ©MAVLab
HiL simulations of conflict resolutions ©MAVLab
PocketCube, TU Delft Space Institute (2018)
Implemented detumbling algorithms using the ADCS (Attitude Determination and Control) subsystem on the Defli-PQ (PocketCube)
- MSP432 firmware for control systems and telemetry
- Magnetometer calibration and IMU sensor fusion
- B dot detumbling algorithm
-
MATLAB simulations with HiL support

PocketCube Workshop Delft
Espressif, Shanghai (2016 - 2017)
Position: Firmware/Applications engineer
Contributing to the firmware development of the famous esp-idf for the ESP32 chip!
- FreeRTOS
- HMI/LCD drivers
- Linear Algebra library support for ESP32
- Audio Processing for voice services
- Benchmark Tests for FLOPS
- Worked on SPI Master Slave bugs on the older ESP8266
- Motor Control Drivers: BLDC, brushed, stepper, servo
- Amazon Web Services MQTT-IoT
 ESP32 during HMI development
ESP32 during HMI development ESP32 connected to AWS
ESP32 connected to AWS DevKit ©Espressif
DevKit ©Espressif
FIRST Robotics Stronghold, Sydney (2016)
Position: Coach of the team FRC6024, representing India internationally once more!
- Designing the control systems for drivetrain of the robot
- National Instruments RoboRio, using the nice WPILib firmware
 Drivetrain with NI RoboRio ©FRC6024
Drivetrain with NI RoboRio ©FRC6024 Robots at Sydney Olympic Park ©FRC6024
Robots at Sydney Olympic Park ©FRC6024 Team picture!
Team picture!
Robocon, Asia Pacific region (2013 - 2016)
Position: team captain, International Robocon 2014
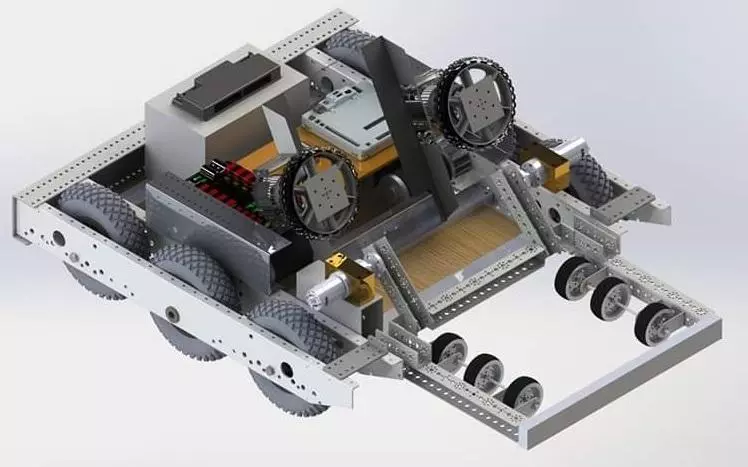
- Prototyped 4 robots throughout the build season
- Control Systems, PCB layouts, Embedded Programming, Pneumatics
- Conducted embedded/robotics systems workshops for 300+ students around Mumbai
(Usually just spent sleepless nights converting whiteboard ideas to real life robots)
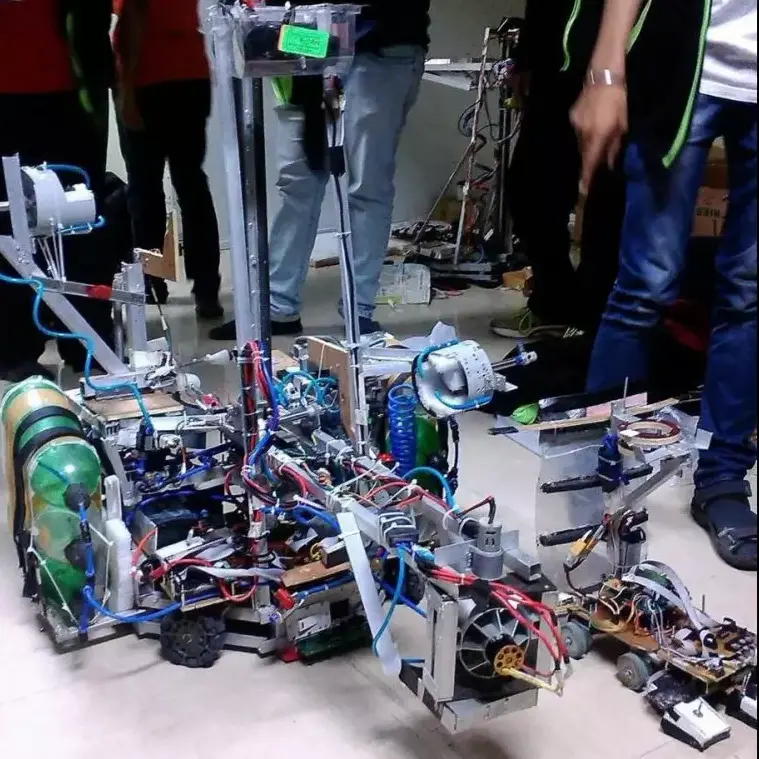 Our robots getting ready for a match ©SRA, VJTI
Our robots getting ready for a match ©SRA, VJTI Start of the international league
Start of the international league Panasonic Award for innovation
Panasonic Award for innovation
archived projects
 Lego Porsche ready for assembly
Lego Porsche ready for assembly Drivetrain
Drivetrain Chassis
Chassis Powered by esp32? why not
Powered by esp32? why not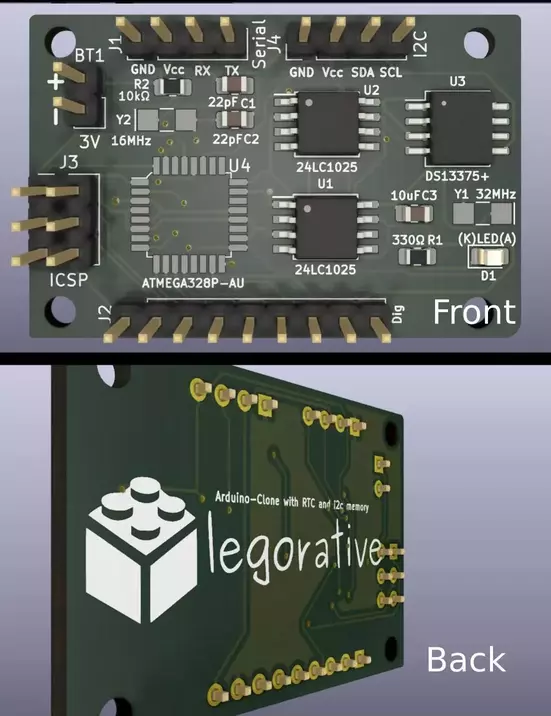 arduino-clone kicad
arduino-clone kicad MIT Media Labs, Imaging Experiences track
MIT Media Labs, Imaging Experiences track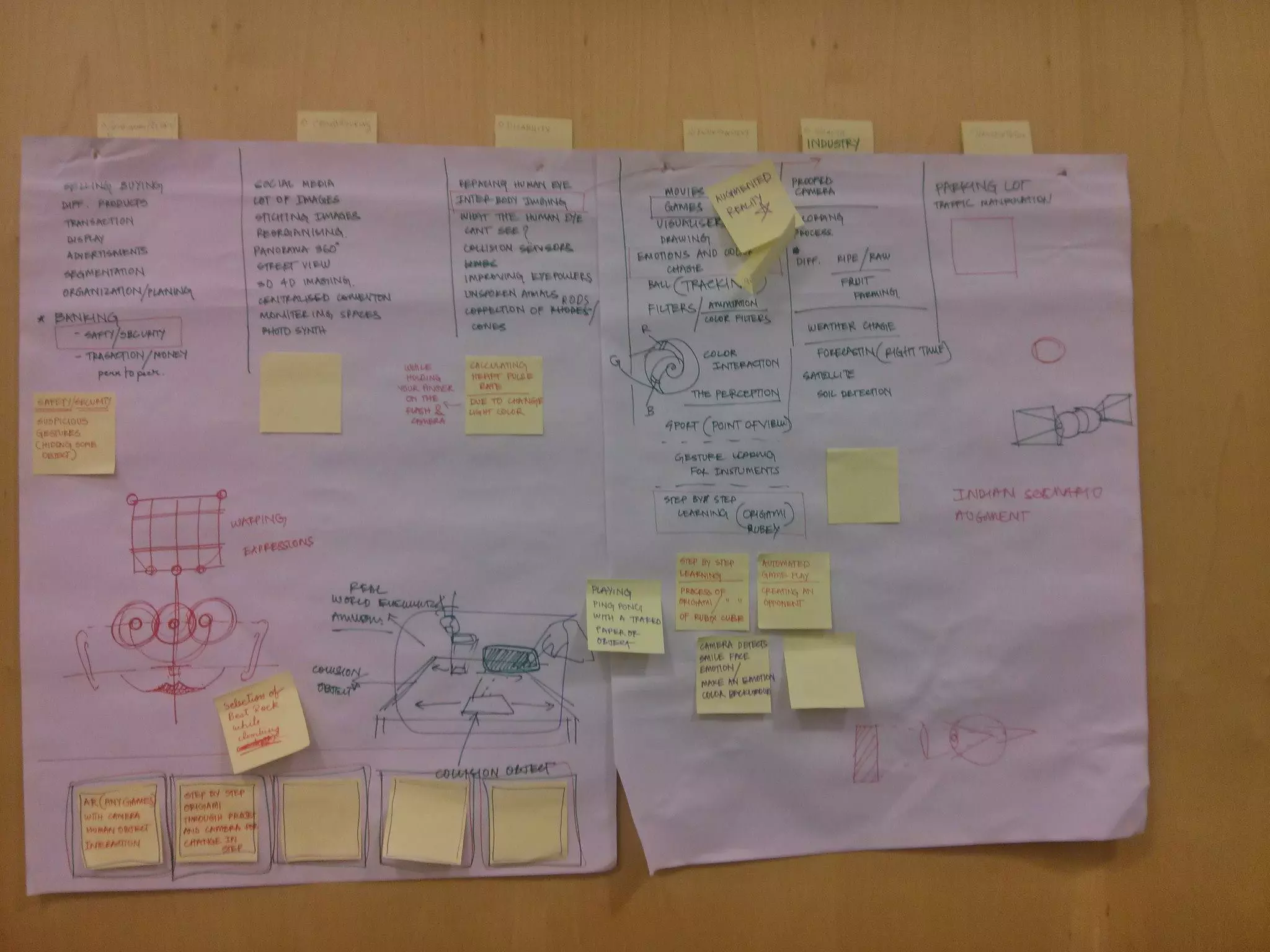 MIT Media Labs, ideation of Pano-band
MIT Media Labs, ideation of Pano-band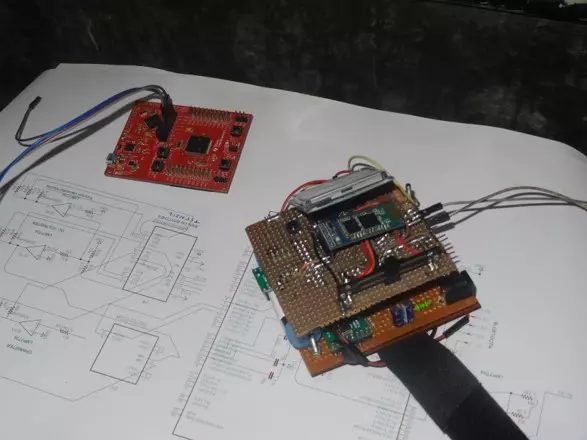 Wrist watch multimeter at Texas Instruments Challenge
Wrist watch multimeter at Texas Instruments Challenge Old self-parking car prototype
Old self-parking car prototype Grid-solving robot
Grid-solving robot